DAVID HENDERSON, NEW SCALE TECHNOLOGIES
Resolution, accuracy, and repeatability are all metrics for measuring the critical requirements of motion
systems. In addition to defining performance, they fundamentally define and affect system complexity,
cost, and development time. Understanding these terms and how they are measured can help designers and integrators to further refine and optimize their instrument requirements.
Consider a closed-loop motion system with a motor, drive circuit, position sensor, and digital controller. The motor produces motion directly or drives a mechanical stage, lens holder, or actuator tip. Growing demand for smaller, high-precision motion control has drawn more attention to motors made of piezoelectric materials, such as quartz or ceramic, that change shape in response to the application of an electrical charge. Piezoelectric motors can deliver positioning into the nanometer range.
Motion systems must include a drive circuit to energize the motor. For closed-loop control, an internal sensor, or position encoder, measures the rotary or linear position of the stage, and a digital controller reads position data from the encoder and sends commands to the drive circuit to move to a target position.
The common dartboard offers a useful model to help visualize the meanings of resolution, accuracy, and repeatability
as they apply to a motion system’s ability to approximate a target position (Figure 1).

Figure 1. The resolution, accuracy, and repeatability of a motion control system can be compared to the distribution of points on a dartboard. Resolution defines the smallest increment of motion that a system can achieve, which, on the dartboard, translates to how tightly darts can be grouped. Accuracy is illustrated by how close a system’s actual position is to a target position — in this case, the bull’s-eye. Repeatability (often called precision) denotes the level of variation in actual positions after several attempts are made to achieve the target position. Courtesy of New Scale Technologies.
Resolution
Position resolution is the smallest incremental movement that a motion system can generate.
Open-loop resolution is the smallest commanded movement that a piezoelectric motor can achieve in response to an input signal. It is typically tens to hundreds of nanometers. The open-loop steps of piezo motors are generally much smaller than the resolution of position
encoders. However, these motor steps have poor accuracy and repeatability.
Closed-loop resolution is the smallest commanded movement that a digital
controller can achieve using its closed-loop algorithm. In practice, closed-loop resolution is the minimum movement
that can be detected by a position encoder. For motion systems — such as New Scale
Technologies’ M3 Focus Module, for
example — the encoder resolution is typically 500 nm.
Position encoders employ either
incremental or absolute encoding methods.
Incremental encoders have a simpler configuration. When in use, they must first be “homed” to a fixed zero-reference position. They determine absolute position by counting encoder steps as the stage moves relative to the home position. A power-off event causes loss of counts and loss of absolute position, and the encoder must then be re-homed.
Absolute encoders are more complex. They directly measure absolute position without the need for homing, which is desirable for many reasons: Absolute
encoding allows faster instrument power-up and initialization. It eliminates the need for a zero-reference position that might interfere with instrument hardware. And it offers the ability to store critical position settings in memory and more easily reproduce them.
Position resolution determines the limits of the system accuracy and repeatability. However, a system can have excellent resolution and still have low accuracy and repeatability.
Accuracy
Position accuracy is only applicable with closed-loop operation. Accuracy is defined as the variance between the stage position achieved by the digital controller and the stage position as measured by an independent measurement method.
This variance is mapped over the range of motion. A significant component of
accuracy variance is repeatable and can be mapped, stored in memory, and corrected for by command offsets. This process, called calibration, improves accuracy up to the limits of system repeatability and resolution (Figure 2).
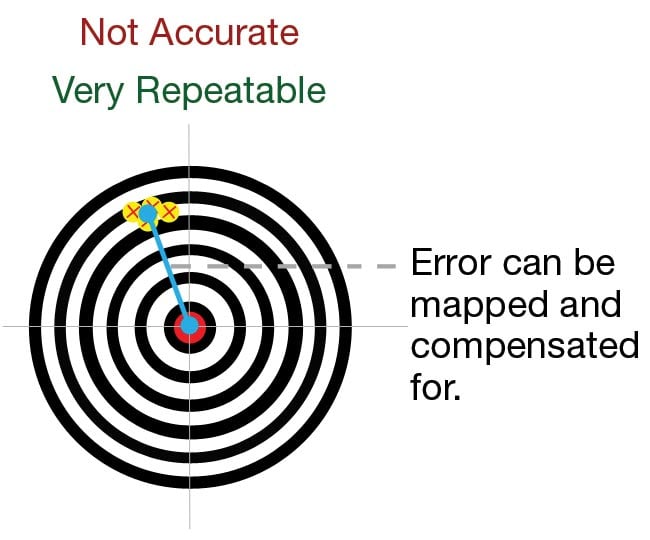
Figure 2. Accuracy variance in motion control systems is often repeatable and can therefore be mapped, stored in memory, and corrected for by command offsets. As long as the variance is repeatable, accuracy can be improved. Building on the metaphor of a dartboard, a person with a repeatable throw can improve their accuracy by adjusting their aim down and to the right. Courtesy of New Scale Technologies.
Repeatability
Position repeatability, also often called precision, describes how well the motion system returns to a consistent position in response to repeated commands to reach the target position. Repeatability can be bidirectional or unidirectional. Bidirec-
tional positioning enables the target
position to be approached from either direction, and total variance is measured. In unidirectional positioning, the target
is approached from the same direction every time. Unidirectional positioning provides better repeatability but requires more movements.
For example, the graph in Figure 3 shows accuracy and repeatability measurements for New Scale Technologies’ M3-F Focus Module with 0.5-µm closed-loop resolution.
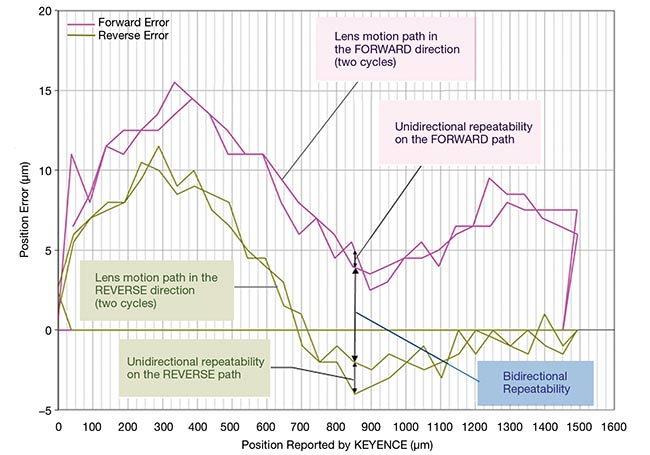
Figure 3. Bidirectional and unidirectional repeatability for a New Scale Technologies M3-F Focus Module with a piezoelectric motor and closed-loop control. Courtesy of New Scale Technologies.
The module’s embedded digital controller moves a lens to a series of target points, both in forward and reverse directions, over its full travel range of 1.5 mm. At each target point, the position is measured with an external KEYENCE laser position sensor. Note that the origin point is position zero, with zero error. This measurement process is performed twice.
The x-axis shows the recorded lens position after each commanded target move. The y-axis shows position error measured by the external laser position sensor for each target position. This position error is the difference in lens location as measured by the external sensor versus the internal sensor.
The vertical difference between curves is the repeatability. The difference between two curves of the same color (indicating travel in the same direction)
is unidirectional repeatability. The difference between curves of different colors (indicating travel in opposite directions) is bidirectional repeatability.
What are the practical implications
of these repeatability measurements?
Consider an autofocusing camera based on this motion control module, in which the image processor collects a series of evaluation images along the optical axis of the lens. One of these images has the sharpest focus, as determined by image analysis. A typical hill-climbing search algorithm will collect images past the sharpest focus and command the lens back to the position of best focus. Fast convergence to best focus requires motion control with good repeatability.
In Figure 3, a more detailed description shows that when the lens is moving in the forward direction, the last image is taken at position 1500 µm on the pink curve. If image analysis determines that the sharpest focus is at 850 µm (on the x-axis), the system needs to move the lens back to the 850-µm position to achieve best focus. This presents two options for users:
Option 1: Reverse direction and stop at the 850-µm position. This is the fastest option. But the actual variance from the optimal position could be as much as
7 µm (bidirectional repeatability).
Option 2: Reverse direction, travel past the 850-µm position, and then move in the forward direction to stop at the
850-µm position. The variance from the target position would be reduced to
approximately 1 µm due to unidirectional repeatability. This approach takes longer but more precisely reproduces the sharpest image.
A camera systems engineer can evaluate and select the best option for the application. For many cameras, detectable changes in sharpness require movements greater than 10 µm, so using the bidirectional repeatability option is sufficient.
Understanding the resolution, accuracy, and repeatability (or precision) of motion systems will help design engineers to achieve the performance they need
without excess complexity, cost, and development time.