Eliezer “Lazer” Besdin, Engineer
AM scanning laser rangefinder sensors could make less costly, lighter-weight systems for helicopter-mounted wire-warning systems.
Wires represent a significant hazard for low-flying helicopters: Collisions with unobserved wire obstacles can result in helicopter or wire damage, or even injuries or fatalities. Because wires are long, thin objects, they may be difficult to detect against various backgrounds (Figure 1).

Figure 1. These wires blend in with the background, becoming nearly invisible, and their length and thinness offer no clues as to how far away they are.
Even if wire obstacles are visible, the human eye has difficulty in gauging their distance (range), leading pilots to incorrectly estimate the time available to avoid them. Both of these problems – wire detection and ranging – have been known to cause collisions that could have been prevented by wire-warning systems (containing scanning laser rangefinder [SLRF] sensors) installed on aircraft.
Such systems alert pilots to impending collisions with these wires; they use SLRF sensors to detect these wires and to provide information on their positions and ranges.
A new type of SLRF sensor – an amplitude-modulated (AM) sensor that uses phase changes of reflected AM laser radiation to detect wires and measure their ranges – could cost and weigh much less, and could be smaller in volume than those currently in use.
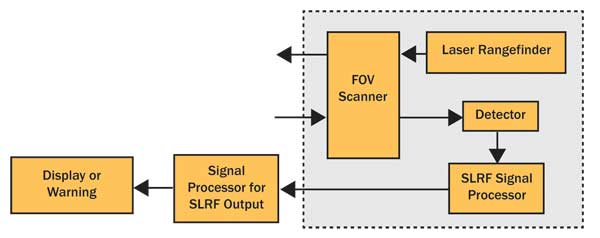
Figure 2. General configuration of wire-warning systems containing scanning laser rangefinder (SLRF) sensors. Photo courtesy of Eliezer Besdin
SLRF wire-warning system
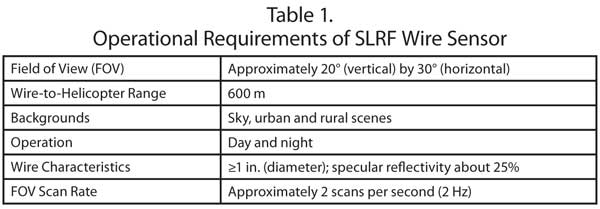
The general configuration of this new wire-warning system is shown in Figure 2. The heart of it is the wire-obstacle SLRF sensor, which meets the operational requirements for field of view, scan rate, day-night operation and other factors, as listed in Table 1.
The wire sensor is basically an SLRF. Two types of laser rangefinders exist: The most common type uses the time of flight (TOF) of short laser pulses to determine range; the other type uses phase changes in reflected AM laser radiation to determine the range to wires.
In the TOF rangefinder (Figure 3), the SLRF sensor transmits short laser pulses toward the wires, and the reflected laser pulses are detected. The pulse TOF to and from the wires determines the distance between them and the helicopter. Most wire-obstacle sensors use TOF SLRFs.
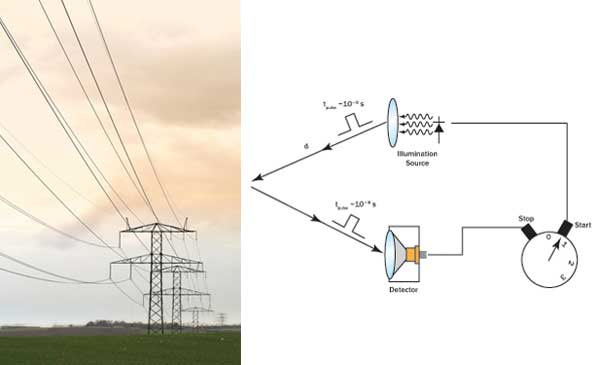
Figure 3. Time-of-flight rangefinder. The distance to the wire (R = d) is determined by the time (t) that the pulse travels to and from the object (wire) detected. That is d = ct/2, where c is the velocity of the pulse. This type of rangefinder is used in the TOF SLRF sensor. Based on W.C. Stone et al (2004). Performance Analysis of Next-Generation LADAR for Manufacturing, Construction, and Mobility. NISTIR 7117, Building and Fire Research Laboratory, Manufacturing Engineering Laboratory, NIST.
In AM SLRF sensors, phase changes in reflected radiation determine wire range. Here, AM lasers are used in SLRF sensors. For these sensors, the modulation frequency of a CW laser is determined by the maximum range to be detected (Figure 4).
SLRF performance
Only a very small part of the total laser beam irradiates the wires. In addition, only a very small part of this radiation is reflected (in all directions – specularly). Therefore, the number of photons received by the SLRF is small, necessitating the use of large-diameter, expensive collecting optics for generating a usable signal. In addition, the TOF SLRF’s noise is high due to the narrow pulses that must be detected.
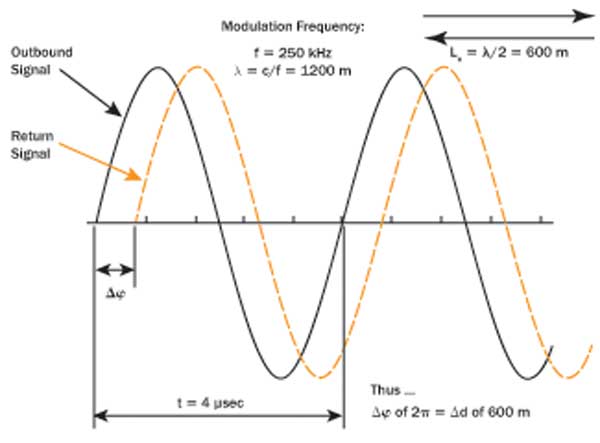
Figure 4. AM SLRF sensor uses phase change of reflected signal (Δφ) to measure distance (range), where d = 1200 × Δφ/2π. Source: W.C. Stone et al (2004). NISTIR 7117.
In contrast, the AM SLRF’s noise is much lower due to the smaller-frequency bandwidth needed. With lower noise, smaller optics can be used, resulting in a higher SLRF signal-to-noise ratio (SNR).
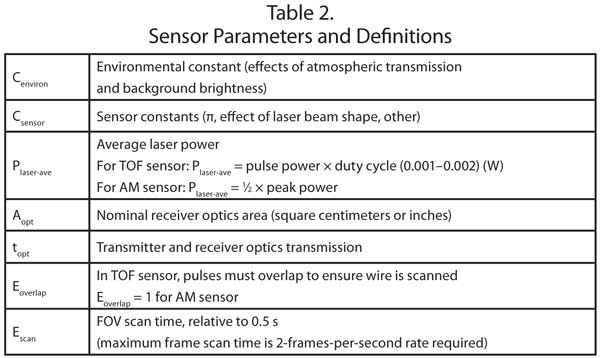
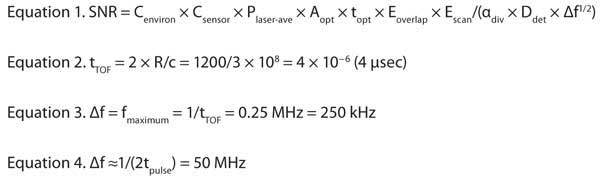
The SLRF detector’s output (SNR) determines its performance – i.e., wire detection probability (Pdet) and sensor false-alarm rate (Pfa). SNR is a function of sensor parameters and environmental conditions. Sensor SNR is given in Equation 1 in terms of parameters listed; it is defined in Table 2.
Frequency bandwidth of AM and TOF sensors
Equation 2 shows the round-trip TOF [for 2R = 1200 m] for a wire at a 600-m maximum range (R), where c is the velocity of light. This is the time needed for a full 2π cycle (wave) for the maximum range. Equation 3 shows the frequency bandwidth of the AM sensor (Δf = fmaximum − 0 Hz). For the TOF sensor, the frequency bandwidth is determined by the laser pulse width (tpulse) (≈10−8 s), as in Equation 4.
Because the SNR (Equation 1) is a function of 1/Δf1⁄2, the SNRAM sensor ~14 × SNRTOF sensor. An AM sensor has an SNR advantage that can be used to offset reductions in SNR that are caused by altering other sensor parameters. This SNR advantage can be used to produce a lighter, less costly sensor with a smaller volume having similar performance to that of the TOF sensor.
Proposed optics
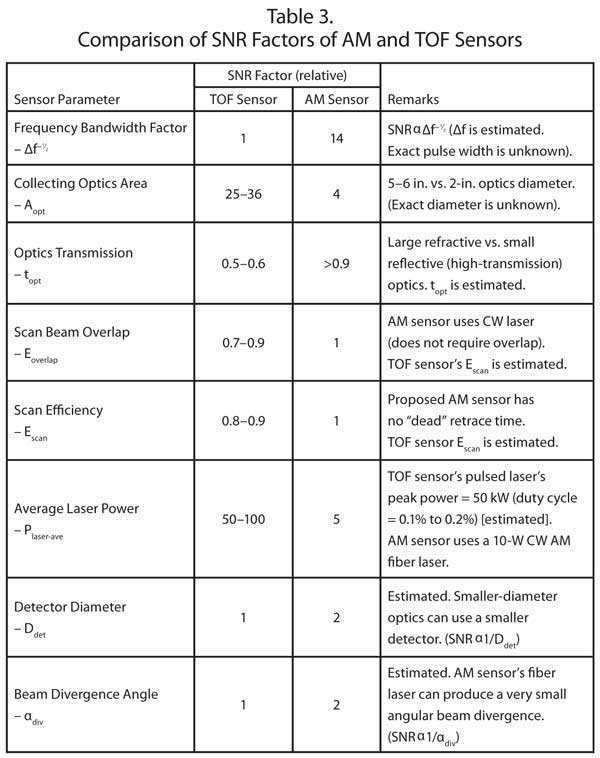
Table 3 compares the SNR factors (Equation 1) of both TOF and AM SLRF sensors when other sensor parameters are altered. Although decreasing the collecting optics diameter reduces the SNR, this is balanced by a reduction of frequency noise (increases the SNR) and other system advantages gained when using smaller optics having higher transmission (lowers system cost, weight and volume) and using smaller detectors with less electronic noise.
Other trade-offs
The proposed AM SLRF sensor uses a CW AM fiber laser, which should cost and weigh less than the pulsed lasers currently used. The fiber laser emits radiation at a wavelength of 1.3 µm and is eye-safe. An additional advantage of fiber lasers over pulsed lasers is that no pulse shapers are needed. Pulse shapers are inefficient in converting electrical power into short laser pulses. The fiber laser can produce laser beams with low angular divergence, leading to a higher SNR.
Thus, in fiber lasers, the conversion efficiency of electrical to radiation power is 20 to 30 percent, whereas in pulsed
lasers, this efficiency is about 1 percent.
The reflective optical element proposed for the AM sensor, which is available commercially, is low-cost, lightweight and features high optical transmission (see topt in Tables 2 and 3). The proposed scanning element is also lightweight and has no “dead” time. It scans the field of view with mechanical rotation in a single direction.
The proposed detector is a single-element, low-noise, solid-state sensor that does not require cryogenic cooling (which could be heavy and costly, and require much electrical power). At most, thermoelectric cooling will be used.
Although ranging with AM phase signals presents some problems, such as range ambiguity and background signal interference, these obstacles can be removed by developing algorithms that can be used in real time. This requires incorporating a dedicated signal processor into the sensor, which will detect the characteristic signatures of wires against various backgrounds.
Figure 5 shows a block diagram of the proposed AM SLRF sensor. Its output is the input for the wire-obstacle warning system.
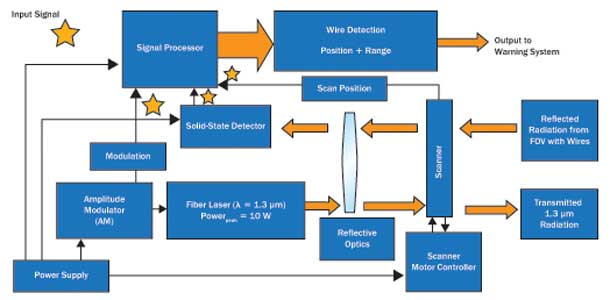
Figure 5. Block diagram of the proposed amplitude-modulated (AM) scanning laser rangefinder sensor (SLRF). The star in the upper left denotes input into the signal processor.
Meet the author
Eliezer "Lazer" Besdin is a retired electro-optical systems design engineer with about 30 years of experience in Israel’s electro-optics industry; [email protected]