Bill Hennessey, Dan Crews and Don Fuller, Alio Industries
Demanding by their very nature, submicron and nanometer-scale positioning tasks are further complicated when the management of motion is under vacuum or when it requires extended travel, more repeatability, higher speed or greater uptime — of course, at lower cost. Accuracy, repeatability, acceleration and force are determined largely by stage configuration and design.
Ball-screw-driven technology. These stages are perhaps the most common and the least expensive. When coupled to servomotors, they receive position feedback from linear or rotary encoders, or use stepper motors that count motor revolutions for positioning. Stages are suited for high-loading (dynamic loading approaching thousands of kilograms) and high-speed applications that require resolution limits in the 0.5-μm range. Typical uses include high-speed multimode fiber optic alignment or less stringent single-mode applications. These stages are best suited for work in a standard atmosphere rather than in a vacuum environment because of heat dissipation and the nature or their components.
Linear-motor-driven stages. Exceptional speed and acceleration with millions of maintenance-free cycles are key benefits. In these three-phase brushless motors, also called AC servomotors, the motor coils travel over a straight magnetic track, and positioning is achieved through communications between interferometers or linear encoders and the motion controller. Devices have high force — in the thousands of kilograms — relative to their physical size, as well as accuracies of ±1 encoder count and submicron resolution. Acceleration usually ranges from 2 g to more than 15 g, and is basically a function of the encoder data rate. Velocities from 2 m/s to more than 10 m/s are typical.
These stages may be better-suited for atmospheric operation than for vacuum environments, as they require air- or liquid-cooling. Linear motors can work in applications using air-bearing stages because of the noncontact relationship between the two motor halves. Linear-motor-driven air-bearing stages using interferometric feedback are commonly found in cleanroom applications that require nanometer-scale resolution. Higher cost may preclude their use in fiber alignment applications.
Piezoelectric-driven stages. Three basic modes are piezo stacks, ratcheting piezo stacks and standing-wave linear piezo servomotors. Piezo stacks are well-suited for 1-nm positioning when motion must be 100 μm or less. Ratcheting devices use piezo stacks with a mechanical ratcheting mechanism, which increases travel capability, but which reduces precision because of mechanical hysteresis.
Standing-wave devices act, in essence, as spiraling friction motors, enabling unlimited travel without mechanical hysteresis. End users can expect resolution down to 1 nm and repeatability below 10 nm at velocities of less than 1 μm/s to more than 300 mm/s. Stages based on Alio Industries’ Nanomotion linear piezomotor, for example, offer encoded motion at better than 5-nm resolution with travel from 1 nm up to meters. The stage architecture is controlled by an optical encoder, is driven by a linear piezoelectric motor and moves over a track in contact with precision, preloaded bearings.
Other performance benefits of piezoelectric-motor-driven stages include shorter settling times (typically 1 ms), large constant velocity range (from less than 1 μm/s to 300 mm/s with less than 0.5 percent variation), no drive inertia and no servo dither. Systems work well in ultrahigh-vacuum environments of 10–10 t, or in standard atmospheric conditions. Although the mechanical components are typically less expensive, the motors, controllers and software are more expensive than those of traditional servo-controlled stages.
For advanced positioning and alignment, an option is a hexapod platform (see figure). This parallel kinematic manipulator consists of six linear struts driven by piezo standing-wave motors connected to a single tooling plate. The goal of this design is to eliminate the buildup of errors common with conventional stacked-stage configurations.
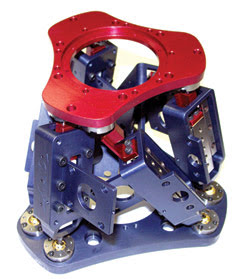
For complex precision positioning applications, a stage with a hexapod configuration can eliminate Abbe, sine and cosine errors associated with stacked stages. The design couples an extremely tight control system with six linear encoders that control linear piezoelectric-motor-driven struts, which, in turn, move a single tooling platform.
The hexapod is being integrated into systems for sophisticated fiber optic applications and into advanced robotic assemblies for fusion energy research, aerospace, government and commercial R&D projects. Another if its advantages is that the tooling plate can be programmed to operate in a standard cartesian coordinate system with six degrees of freedom about a user-defined location in space. The ability to align fiber about a tool center point enhances product quality while reducing program development.
Advanced photonic applications add demanding requirements for precision stages. During product development, end users often do not know the configuration or the degrees of freedom their equipment will need.
Most stages readily interface with the existing software programs used in research or manufacturing facilities. However, it is important to note that integration of controller, software and stage components can be a major issue, especially because the interface requirements are determined before the stage is built.
Ultimately, all three stage designs are highly reliable and provide very long mean time between failures. Key considerations in matching the stage architecture to the application include travel, speed, load, precision, repeatability, operating environment and degrees of freedom.
Meet the authors
Bill Hennessey is founder and president of Alio Industries in Loveland, Colo.; e-mail: [email protected].
Dan Crews is photonics general manager, and Don Fuller, marketing manager, at the company.