Vision guidance is required for robotic fluid dispensing over rough and uneven surfaces, or for complex projects.
Johnathan Titone, Nordson EFD
Robotic fluid dispensing is
essential for applications that require extremely accurate and repeatable
fluid deposit placement,
complex dispensing patterns, and/or
high-volume throughput.
The precise positioning and quantity of these fluids deposited on a substrate
is vital to the assembly, function, quality, appearance, and viability of products. Such precision repeatability also optimizes fluid usage, reducing waste
and production costs.
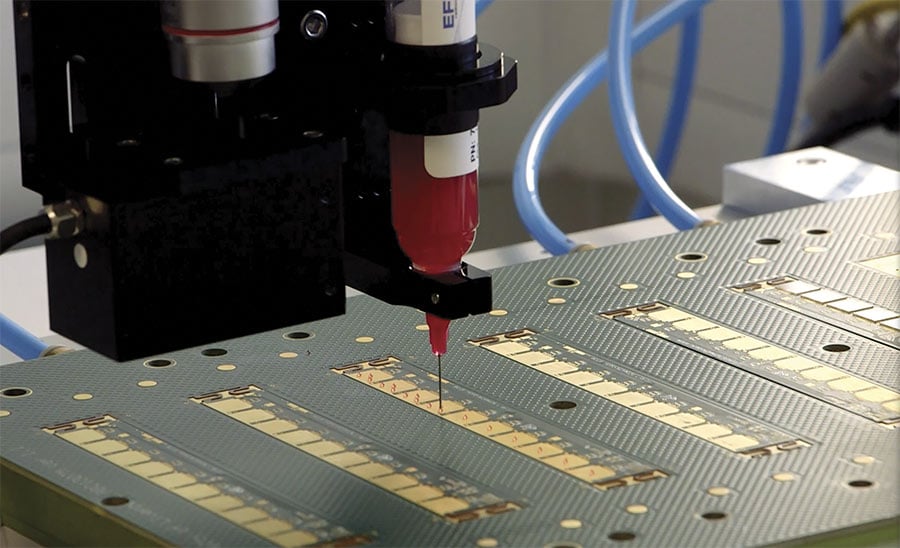
Dispensing fluid onto an electronic substrate. Silver CCD camera at top left. Courtesy of Nordson EFD.
Critical to this performance is the robot’s vision-guidance system. Vision
gives flexibility to the robot by allowing precise deposit placement —
down to the micron level. Used in fluid-dispensing applications for more than two decades, vision is becoming
more prominent as robots and their control software get smarter. Vision
permits robotic fluid-dispensing systems to deliver faster production cycles
and removes the guesswork from the
dispensing process, which minimizes
programming time and reduces overall
operational costs.
Point-to-point teach method
The most fundamental form of programming for robotic fluid dispensing is performed with a teaching pendant device by eyeballing the location of
the dispensing tip on the substrate.
The point-to-point teach method is
executed manually, with the operator
moving the tip over the substrate
location where dispensing is to be targeted. Once the substrate location
and coordinates of the XYZ axes have been determined, they are saved in
the control software. This process is
repeated for all substrate locations where deposition is targeted. The robot will move to these precise locations every time and dispense fluid as dicta-
ted by the fluid-dispensing software.
The teaching pendant permits a
high volume of dispense patterns to be programmed. The number and complexity of dispensing patterns can
make the programming process time-consuming with a teaching pendant
device. If the automation will be running
multiple patterns of a complex nature,
an integrated camera or CCD is
recommended.
Robot software, critical to robotic fluid dispensing, automatically adjusts the positioning of dispensed material
to accommodate curves, complex contours, or slight errors in workpiece positioning in the nest or fixture. These adjustments would otherwise prove difficult to achieve with nonrobotic methods. Controlling fluid deposition with visional-capable substrate and pattern recognition ensures the deposit is in the correct location up to positional tolerances of ±3 µm. The software
can precisely manage the various
materials being dispensed, such as
adhesives, greases, epoxies, silicones,
and sealants.
Such software allows AutoCAD
DXF files to be imported, so the manufacturer can program fluid-dispensing patterns in their preferred CAD software and then seamlessly import
the DXF file from the software into the dispensing automation platform.
Complicated dispensing
With more complicated dispensing,
the need increases for an offsetting
capability, meaning the ability to look
at a location on the substrate before
the dispensing is complete and to offset the program if there are any changes to the substrate. This is where
vision systems would be better suited
for the application.
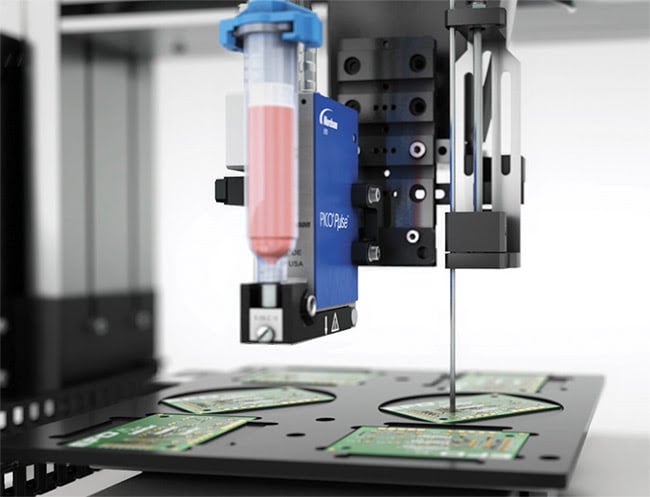
Height sensing. Courtesy of Nordson EFD.
Such systems for robotic fluid dispensing vary, from simple USB-compatible pencil cameras to CCD-equipped imaging systems. The critical difference is in the resolution: the number of pixels in the camera’s sensor and the camera’s shutter speed ability. For most robotic dispensing applications, the simple vision pencil camera system is adequate. But if the substrate measures below 100 µm, or the cycle time is crucial to the application, a CCD is required over a USB pencil camera.
These cameras function by taking a
picture of a part on the substrate and
then applying any necessary offsets by adjusting the dispensing program to match the location and shape of the path with the location and shape of the part. The camera verifies the location by identifying a distinguishing edge of the part that can be referenced. This reference point will allow the dispensing software to offset fluid dispensing if the point changes location — such as if
the substrate registration is slightly displaced when positioned in the robot — and allows it to apply the offset change to the new location where the dispensing is to be placed on the substrate.
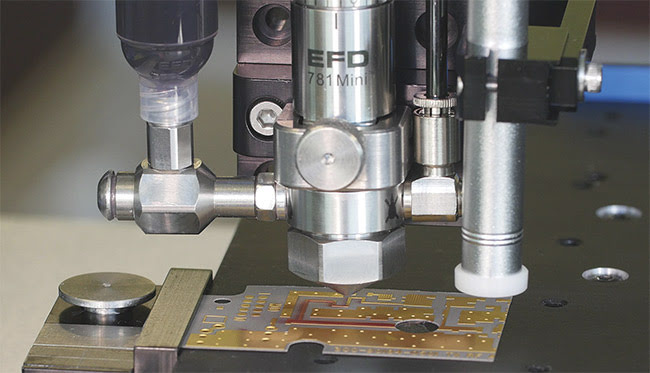
Pencil camera (silver cylinder with white cap on Nordson EFD fluid dispenser). Courtesy of Nordson EFD.
Converting pixels into digital values
Both pencil and CCD cameras convert analog camera image pixels into digital values for extremely precise image management. Some relatively inexpensive pencil camera systems, combined with specialized dispensing
software, allow even first-time users to program complex dispense patterns
and arrays with high repeatability up
to ±8 µm (0.008 mm).
CCD cameras capture even higher-definition images, showing detailed component parts, where shadow enhancement allows vision identifica-
tion and processing of poor, faint marks — with minimal time interruptions to
the dispensing cycle. Its shutter rapidly
captures high-contrast part images,
eliminating blurriness and small distortions found in rolling shutter systems. When paired with intuitive dispensing
software and a closed-loop motion control system, the CCD camera enables robots to achieve repeatability
of ±3 µm (0.003 mm).
Laser height sensing
The Nordson EFD PRO Series permits a laser height-sensing capability to also be added on. Laser height sensing allows the topography of the substrate to be mapped and the measurements to be passed back to the robot so it can automatically offset the Z-axis values and maintain the correct dispense gap over the substrate. The process
occurs in real time for every part that runs using this feature, ensuring high-quality dispense outcomes even on warped or twisted substrates. These fully integrated, smart vision CCD cameras for robotic fluid dispensing provide
true 3D motion control. The robots
then have three types of feedback — optical, contact, and noncontact laser-height sensing — when the CCD, tip-detect device, and laser-height sensor are installed, allowing for easy programming of dots, lines, circles, arcs, compound arcs, and complex
patterns. The tip-detect device changes the offsets to the program if a tip changes on the syringe or valve.
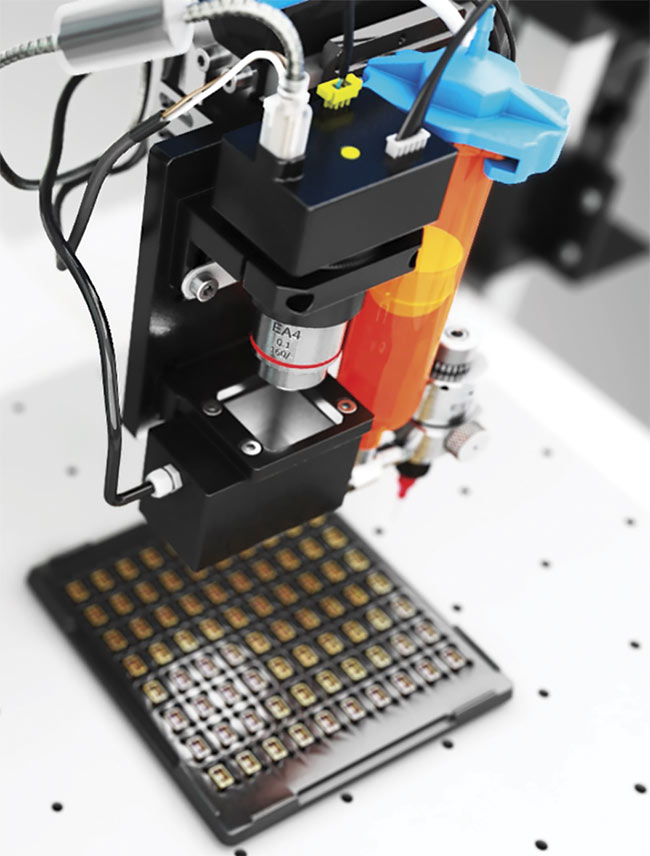
Nordson EFD PRO Series CCD camera (silver cylinder with red band). Courtesy of Nordson EFD.
More advanced vision-guided
software enables the ultraprecise,
high-speed simple vision and CCD-equipped vision capabilities found in
the latest-generation robotic fluid-dispensing systems. Such software programs enable the full capabilities of vision-guided fluid dispensing to be realized from these robotic systems.
A distinguishing aspect of the software’s integrated functionality is its
precision in controlling and managing the critical offsetting capability —
comparing the current workpiece location to a reference location that is stored as an image file within the program. When the robot detects a difference in the X and Y positions and/
or the angle of rotation of the workpiece, the software automatically adjusts the dispensing path to correct the difference. The offsetting function is constantly receiving process data to ensure that the dispensing process is executed with precise control.
The software’s intuitive interface
simplifies setup and facilitates programming with an on-screen preview of
the dispensing path. An initial setup wizard makes the dispensing robot easy to set up and use by visually steering operators through each step of the process, including the calibration and setting of offsets.
Robotic fluid dispensing
The integration of robots with vision and advanced dispensing software has considerable benefits for manufacturers. These latest-generation systems, both syringe-based and valve-based, are ideal for dots, lines, potting, damming, filling, underfilling, encapsulation, sealing, coating, and jetting — for a wide range of applications, from inline to batch dispensing. They provide
sophisticated fluid-dispensing capabilities, more accurate placement, and greater consistency, while remaining
simple and intuitive to program.
Meet the author
Johnathan Titone is product line specialist-automation for Nordson EFD. Since joining Nordson EFD in 2006,
he has used his expertise in fluid dispensing and automation to assist customers in the development of
precision dispensing. He has a bachelor’s in business management from Johnson & Wales University.